
MOTOR ABB M3BP160M3GBP162501
ABB MOTOR M3BP160L3GBP162502
ABB MOTOR M3BP200MLB3GBP204002
ABB MOTOR M3BP315LKC3GBP314830
M3BP 71 MC2, 3GBP071330-ASL, 3GBP071330-BSL, M3BP 71 ME2, 3GBP071350-ASL, 3GBP071350-BSL, M3BP 80 MC2, 3GBP081330-ASL, 3GBP081330-BSL, M3, BGB, MGB, MGBB SLA80GBP2-ASL, 3GBP081350-BSL, M3BP 081350 LA3, 90GBP23-ASL, 091010GBP3-BSL, M091010BP 3 MLA90, 2GBP3-ASL, 091510GBP3-BSL, M091510BP 3 ME100, M2BP 3 ME101410, M3BP 101410 ME3, M112BP 2 ME3, M111350BP 3 M111350, 3GBP ADL, 132GBP2-BDL, M3BP 131230 SME3GBP131230-ADL, 3GBP132-BDL, M23BP 131250 MLA3, 131250GBP3-ADL, 160GBP2-BDL, M3BP 161410 MLB3, 161410GBP3-ADL, 160GBP2-MGBP-3GBP-161420GB BDL, M3BP 161420 MLA3, 160GBP2-ADL, 3GBP161430-BDL
M3BP 200 MLA2, 3GBP201410-ADL, 3GBP201410-BDL, M3BP 200 MLB2, 3GBP201420-ADL, 3GBP201420-BDL, M3BP 225, SMA23GBP-221210, 3GBP221210-BDL, M3BP 250 SMA2, 3GBP251210-ADL, 3GBP251210-BDL, M3BP 280 SMB2, 3GBP281220-ADL, 3GBP281220-BDL, M3BP 280 SMC2, 3GBP281230-ADL, 3GBP281230 ADB, 3GBP315 ADB, 2GBP3 BDL, M311220BP 3 SMC311220, 3GBP315-ADL, 2GBP3-BDL, M311230BP 3 SMD311230, 3GBP315-ADL, 2GBP3-BDL, M311240BP 3 MLA311240GBP3-ADL, 315GBP23-ADL, 311410GBP3-ADL, 311410GBP3B-315GB SMA2, 3GBP311820-ADL, 3GBP311820-BDL, M3BP 355 SMB2, 3GBP351210-ADL, 3GBP351210-BDL, M3BP 355 SMC2, 3GBP351220-ADL, 3GBP351220-BDL, M3BP 355B2, MGBB 3GB351230 ASL, 3GBP351230-BSL, M3BP 71 MLC4, 3GBP072340-ASL, 3GBP072340-BSL, M3BP 71 MLE4, 3GBP072450-ASL, 3GBP072450-BSL, M3BP 80 LA4, 3GBP082430P3, BGBL 082430GBP3-BSLM80BP 4 LA3

3GBP102510-ASL, 3GBP102510-BSL, M3BP 100 MLB4, 3GBP102420-ASL, 3GBP102420-BSL, M3BP 112 ME4, 3GBP112350-ADL, 3GBP112350-BDL, M3BP 132 SMB4, 3GBP 132220 SMB3, 132220GBP 3 SMB132, 4GBP3P ADL, 132250GBP3-BDL, M132250BP 3 MLA160, 4GBP3-ADL, 162410GBP3-BDL, M162410BP 3 MLB160GBP43-ADL
3GBP162420-BDL, M3BP 180 MLA4, 3GBP182410-ADL, 3GBP182410-BDL, M3BP 180 MLB4, 3GBP182420-ADL, 3GBP182420-BDL, M3BP 200 MLA4, 3GBP202410-ADL, 3GBP202410A-3GBP225A-4GBP3 BDL, M222210BP 3 SMB222210, 3GBP225-ADL, 4GBP3-BDL, M222220BP 3 SMA222220, 3GBP250-ADL4GBP3-BDL
M3BP 280 SMB4, 3GBP282220-ADL, 3GBP282220-BDL, M3BP 280 SMC4, 3GBP282230-ADL, 3GBP282230-BDL, M3BP 315 SMB4, 3GBP312220-ADL, 3GBP312220-BDL, M3B315, M4B SMD3GBP312230-ADL
3GBP312240-BDL, M3BP 315 MLB4, 3GBP312420-ADL, 3GBP312420-BDL, M3BP 315 LKA4, 3GBP312810-ADL, 3GBP312810-BDL, M3BP 355 SMA4, 3GBP352210P-3, 352210GB-3, 355GB BDLM4BP 3 SMC352220
3GBP352230-ADL, 3GBP352230-BDL, M3BP 71 ME6, 3GBP073350-ASL, 3GBP073350-BSL, M3BP 80 MB6, 3GBP083320-ASL, 3GBP083320-BSL, M3BP 80 MC6, 3GBP083330, 3GBP083330GB ASL, 3GBP80-BSL, M6BP 3 SLD083350, 3GBP083350-ASL, 3GBP90-BSL, M6BP 3 LF093040GBP3-ASL
3GBP093560-BSL, M3BP 100 MLB6, 3GBP103420-ASL, 3GBP103420-BSL, M3BP 112 MJ6, 3GBP113390-ASL, 3GBP113390-BSL, M3BP 132 SMB6, 3GBP133220-ASL, 3GBP 133220 SMB3, 132GBP6-ASL, 3GBP BDLM133260BP 3 SMJ133260
3GBP133290-ADL, 3GBP133290-BDL, M3BP 160 MLA6, 3GBP163410-ADL, 3GBP163410-BDL, M3BP 160 MLB6, 3GBP163420-ADL, 3GBP163420-BDL, M3BP 180 MLA6, 3GBP183410, 3GBP183410-MGB3 ADL, 200GBP6-BDL, M3BP 203410 MLB3, 203410GBP3-ADL, 200GBP6-BDL, M3BP 203420 SMA3GBP203420-ADL
3GBP223210-BDL, M3BP 250 SMA6, 3GBP253210-ADL, 3GBP253210-BDL, M3BP 280 SMB6, 3GBP283220-ADL, 3GBP283220-BDL, M3BP 280 SMC6, 3GBP283230-ADL, 3GBP283230 ADB, 3GBP315 ADB, 6GBP3 BDLM313220BP 3 SMC313220
3GBP313230-ADL
3GBP313230-BDL
M3BP 315 SMD6
3GBP313240-ADL
3GBP313240-BDL
M3BP 315 MLB6
3GBP313420-ADL
3GBP313420-BDL
M3BP 315 LKA6
3GBP313810-ADL
3GBP313810-BDL
M3BP 355 SMA6
3GBP353210-ADL3GBP353210-BDL
M3BP 355 SMB6
3GBP353220-ADL
3GBP353220-BDL
M3BP 355 SMC6
3GBP353230-ADL
3GBP353230-BDL
M3BP 355 MLB6
3GBP353420-ADL
3GBP353420-BDL
M3BP 355 LKA6
3GBP353810-ADL
3GBP353810-BDL
M3BP 71 ME8
3GBP074350-ASL
3GBP074350-BSL
M3BP 80 MF8
3GBP084360-ASL
3GBP084360-BSL
M3BP 80 MLG8
3GBP084470-ASL
3GBP084470-BSL
M3BP 90 SLF8
3GBP094060-ASL 3GBP094060-BSL
M3BP 90 LG8
3GBP094570-ASL
3GBP094570-BSL
M3BP 100 LKD8
3GBP104840-ASL
3GBP104840-BSL
M3BP 100 LKF8
3GBP104860-ASL
3GBP104860-BSL
M3BP 112 MF8
3GBP114360-ASL
3GBP114360-BSL
M3BP 132 SMD8
3GBP134240-ASL
3GBP134240-BSL
M3BP 132 SMJ8
3GBP134290-ASL
3GBP134290-BSL
Eficiència: estàndards europeus d’eficiència del nivell
· Potència: 0.25 - 710KW (es poden importar més de 710KW amb motor M3BP)
· Tensió: 220-690v
· Es poden afegir diversos accessoris com el codificador
· Disponible un sistema de refrigeració independent
· Unitat de freqüència ordinària o variable opcional
·> Potència de 100 kW quan es necessita una unitat de conversió de freqüència amb un coixinet aïllant

Està dissenyat per satisfer els requisits de les pitjors condicions de treball de la indústria de processos actuals
El motor lineal es pot considerar com una deformació estructural del motor giratori, que es pot considerar com un motor giratori al llarg de la seva secció radial, i després d'evolució plana. Amb el desenvolupament d’alta velocitat de tecnologia de control automàtic i microordinador, per a tot tipus de sistema de control automàtic de precisió de posicionament es presenta la major sol·licitud, en aquest cas, el motor giratori tradicional i un conjunt de mecanismes de transformació de controladors de dispositius de moviment lineal. , fins ara no pot satisfer les exigències del sistema de control modern, per tant, molts països del món es troben en investigació, desenvolupament i aplicació de motors lineals, fa que el camp d’aplicació del motor lineal sigui cada vegada més ampli.
Gairebé totes les màquines industrials impliquen un motor, però aquests motors tenen requisits cada cop més específics. Des de motors de pancakes sense estructures fins a motors armaris / arborats, necessiteu una selecció de motors d’alt rendiment per alimentar les vostres aplicacions més exigents. Portem el millor en motors stepper, stepper i servomotors integrats per satisfer les vostres necessitats.
Les nostres marques de motor d’alt rendiment
Transportem productes de motor de les següents marques:
- Productes de moviment aplicat
- collage
- Sanyo-Denki
-
És de grau alt amb la màxima funció i alta fiabilitat en el motor de pas RoHM. El paquet de baixa resistència DMOS i una gran capacitat de dissipació de calor redueixen la calor de IC i enriqueixen la sèrie de circuits de protecció. Amb controlador de mode d’accionament de corrent constant bipolar PWM de baix consum, tensió nominal 36V, corrent de sortida nominal per a funcions bàsiques de 1.0a ~ 2.2a. Hi ha tres tipus d’interfícies d’entrada: clk-in / paral·lel-in intercanviable, clk-in i paral·lel-in. Els modes d’excitació són compatibles amb els modes PAS complet, pas mig (2) i QUATER PAS. El mode DECAY actual és gratuït per configurar la proporció de FAST DECAY a SLOW DECAY. Per aconseguir un control òptim de tots els motors. I perquè l’alimentació pot ser impulsada per un sol sistema, ajuda a dissenyar el dispositiu amb més facilitat.
Diferència entre motors d’altes prestacions i de baix rendiment
1. Precisió de control: com més nombre de fases i ritmes del motor esglaonat, més alta serà la seva precisió.
2. Característiques de baixa freqüència: el motor pas a pas és propens a vibracions de baixa freqüència a baixa velocitat. Quan funciona a baixa velocitat, amorteix la tecnologia o ...
3. Característiques de freqüència actual: el parell de sortida del motor pas a pas disminueix amb l’augment de la velocitat de rotació, que disminuirà bruscament a alta velocitat.
4. Capacitat de sobrecàrrega: el motor pas a pas no té capacitat de sobrecàrrega i el servo motor té una forta capacitat de sobrecàrrega; Rendiment de la velocitat de resposta: ...
5. Funcionament del funcionament: el motor pas a pas es controla mitjançant un control de bucle obert, i la freqüència d’arrencada és massa alta o la càrrega massa gran, cosa que és fàcil de perdre els passos o de girar el bloc.
El desenvolupament de vehicles elèctrics és una de les maneres efectives de solucionar l'escassetat de recursos petrolífers i la contaminació ambiental a la Xina i realitzar un desenvolupament sostenible. És també una mesura estratègica important per millorar la competitivitat central de la indústria automobilística de la Xina. El factor clau per restringir el desenvolupament d'eVs és el gran avenç dels materials per a bateries. Tot i això, el desenvolupament de potència híbrida i baixa velocitat encara no és possible, a condició que la tecnologia de bateries del vehicle no aconsegueixi un gran avenç
- La nova tecnologia Regulusstage de Japan co., LTD. Regulusstage permet una major sortida de potència i un millor rendiment de control. El motor de 5 eixos amb tecnologia Regulusstage es va disposar al microscopi electrònic d’escaneig d’emissions de camp SU8040, que també va millorar el rendiment del microscopi electrònic.
-
El disseny i la simulació de rendiment d’una nova estructura de motor d’amant permanent de baixa velocitat
El desenvolupament de vehicles elèctrics és una de les maneres efectives de solucionar l'escassetat de recursos petrolífers i la contaminació ambiental a la Xina i realitzar un desenvolupament sostenible. És també una mesura estratègica important per millorar la competitivitat central de la indústria automobilística de la Xina. El factor clau que restringeix el desenvolupament d'ev és el avenç de materials de bateries aigües amunt i el desenvolupament actual de potència híbrida i baixa velocitat petita ...
-
Microscopi que utilitza tecnologia d’imatge de motors d’alt rendiment i baixa tensió d’acceleració
La nova tecnologia Regulusstage de Japan co., LTD. Regulusstage permet una major sortida de potència i un millor rendiment de control. El motor de 5 eixos amb tecnologia Regulusstage es va disposar al microscopi electrònic d’escaneig d’emissions de camp SU8040, que també va millorar el rendiment del microscopi electrònic.
- En els darrers anys, els robots de serveis intel·ligents s’han desenvolupat ràpidament, amb l’objectiu de substituir els serveis humans. Com a una de les parts més importants del robot de servei, l’articulació elèctrica permet al robot assolir funcions més abundants. Actualment, el producte del mòdul d’articulació elèctrica no està madur i el preu del micro-servo controlador és alt. És de gran importància desenvolupar un mòdul de control de motor conjunt de baix cost, universal i d’alt rendiment. Una de les parts més importants per assegurar el rendiment de les juntes elèctriques és una de les parts més importants del motor. La seva realització inclou el disseny de la unitat de maquinari, la selecció del sistema de control de servo, la retroalimentació de mesurament de la posició i el parell del rotor, la retroalimentació de mesura de la posició conjunta i el disseny del sistema de maquinari incrustat. Aquest projecte pren el robot de servei bancari com a aplicació del projecte i utilitza el motor síncron d’imant permanent com a font d’energia. El mètode de control vectorial s’adopta per controlar el motor, de manera que s’aconsegueixi l’efecte de control de l’obturació de torsió baixa i el baix soroll. El codificador d'alta precisió i el sensor de sala de motors s'utilitzen per mesurar la posició del rotor del motor i s'utilitza un interruptor extern per mesurar la posició absoluta de l'articulació. El parell del motor és directament proporcional al corrent de parell. El corrent vectorial del bobinat del motor es mesura pel sensor de corrent i es distingeix el corrent de parell i el corrent d’excitació mitjançant el càlcul de desacoblament. A continuació, analitza els diferents tipus de motors que es poden utilitzar en la font d’energia i les juntes elèctriques de diferents sistemes, i determina les funcions de maquinari i els indicadors del servomotor. La interfície del maquinari és compatible amb els motors DC, AC i lineals. Després de la comparació i selecció del dispositiu, prova i verificació, completeu el disseny d’escriptura de mòduls de maquinari i programari.
- L’anàlisi del disseny i els resultats de les proves del prototip demostren que, en comparació amb el tradicional motor DCC sense escombretes de dues fases, té una elevada densitat de parell, alta densitat de potència, una petita ondulació de parell i un cost baix.
-
El sistema d’accionament del motor dels vehicles és una de les tres tecnologies clau dels vehicles energètics nous, que requereixen un major rendiment, una potència específica més gran i una temperatura ambiental més elevada. Aquest treball introdueix principalment el sistema d’accionament de motor d’amant permanent per a cotxes d’alt rendiment i alta densitat de potència, alta eficiència i baix cost del controlador de motors d’automòbils, un motor d’excitació híbrid eficient d’àmplia àrea i una plataforma de programari digital de control d’alt rendiment digital de tres tecnologies clau, aporta l'abast de la densitat de potència, l'eficiència total, la fiabilitat, el manteniment i el cost, etc. és superior a les solucions tradicionals del sistema de motor motor per a accionaments de motor. Basant-se en la investigació, es va desenvolupar un prototip de sistema d’accionament de motors de vehicles de gran densitat que es va aplicar amb èxit al vehicle de policia elèctrica pura LF620 i va servir a l’exposició mundial de Xangai el 2010.
El sistema motoritzat al nostre país en matèria d’energia, transport, fabricació d’alta gamma i defensa nacional en les àrees d’equipaments importants s’ha aconseguit en una sèrie d’assoliments importants, però els camps d’aplicació de l’ampliació del funcionament del sistema motor presenten requisits més elevats. , manifestació concreta d'alta qualitat per als "quatre alts", "baixos", "un més", és a dir, alta densitat de potència, alta fiabilitat, alta adaptabilitat, alta precisió, baixes emissions, compost multifuncional. D'acord amb diferents àrees, així com el requisit d'aplicació del mal entorn, aquest treball es va plantejar diversos aspectes científics bàsics i es va discutir sobre la direcció del desenvolupament del sistema motor. , a saber: ampliar la vora del material i dispositius precisos del model, per adaptar-se als entorns extrems i l'aplicació extrema a la condició dels requisits dels equips; La idea d’integració composta multifuncional integra percepció i execució per aconseguir una alta densitat funcional i alta fiabilitat.
- El motor AC és un sistema complex amb acoblament fort multi-variable de camp elèctric, camp magnètic i camp de força. Per als motors sincrònics trifàsics ac asincrònics i trifàsics, hi ha tres característiques comunes principals: no linealitat, acoblament fort i incertesa. Per millorar el rendiment del variador de CA, la clau és superar els efectes adversos d’aquestes tres característiques sobre el control del motor. Basat en el 973 projecte de recerca de fabricació digital "el control de l'evolució del comportament dinàmic de màquina-eina d'alta velocitat i d'alta precisió nc" i el projecte nacional de fons de ciències naturals "basat en la teoria de l'estratègia de control lineal jeràrquic fuzzy lineal de control de la unitat de recerca", amb el suport de els estudis són la tecnologia clau dels motors d’acció d’alt rendiment, aquesta tesi fonamentalment investiga els continguts i els punts d’innovació resumits de la manera següent: 1. A través del modelat dinàmic sota la condició de motor ideal, el motor s’analitza les causes fonamentals de tres problemes habituals. En la major mesura, reduir el parell motor i l'excitació del fort acoblament de dues direccions, va completar el model ideal del motor des del sistema de coordenades estàtiques fins a la transformació de coordenades giratòries, el mecanisme de treball, sobre la base de la comprensió profunda del vector del motor. Es proposa un mètode de control i el mètode de control directe del parell per a dos tipus de mètode de control avançat del motor i, en vista del principi del mètode de control directe del parell de desavantatges, es presenta el mode de control directe directe de la parella combinada amb SVPWM. La simulació i els resultats experimentals demostren plenament la seva correcció i efectivitat. 2. Per al problema de la incertesa, aquest treball el divideix en aspectes interns i externs i adopta l'estimació de paràmetres en línia i l'estratègia de control avançat per resoldre'l. La incertesa interna és causada principalment per les característiques lentes que varien en el temps dels paràmetres del motor de ca. El mètode d’estimació de paràmetres en línia dels mínims quadrats del factor oblidat basat en la simplificació de l’operador Lagrange s’aplica per rastrejar els canvis de paràmetre.
-
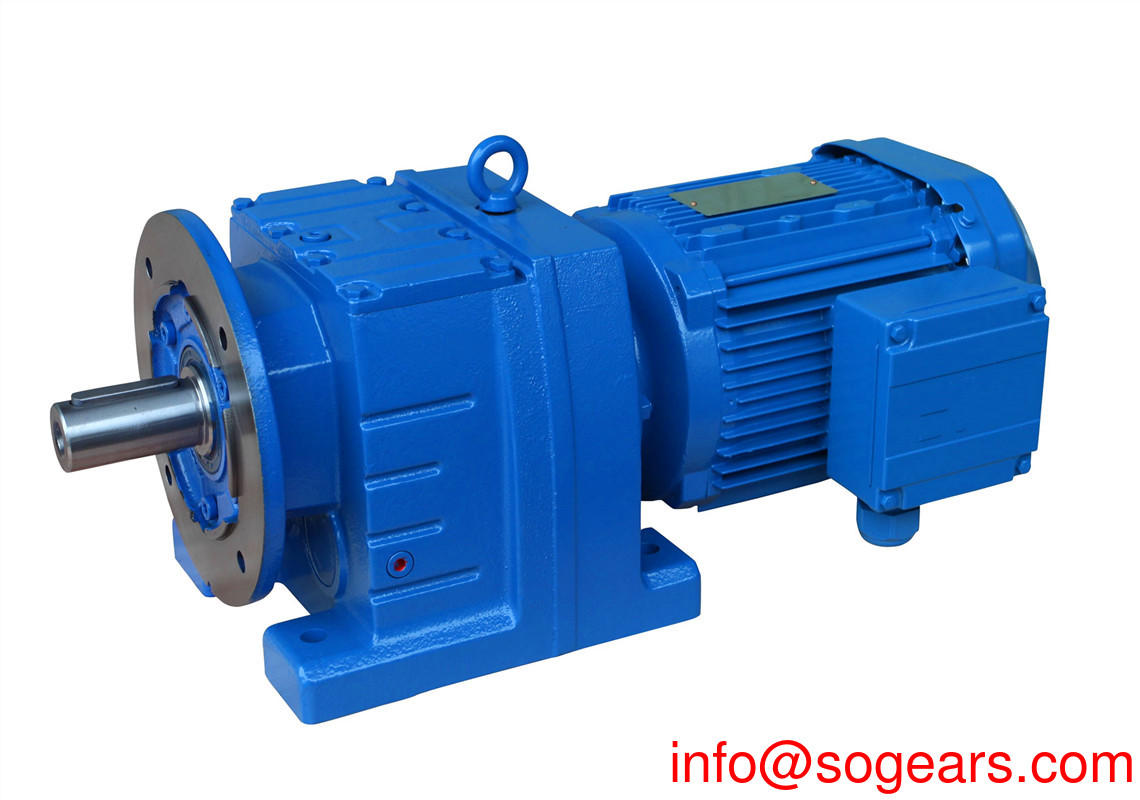
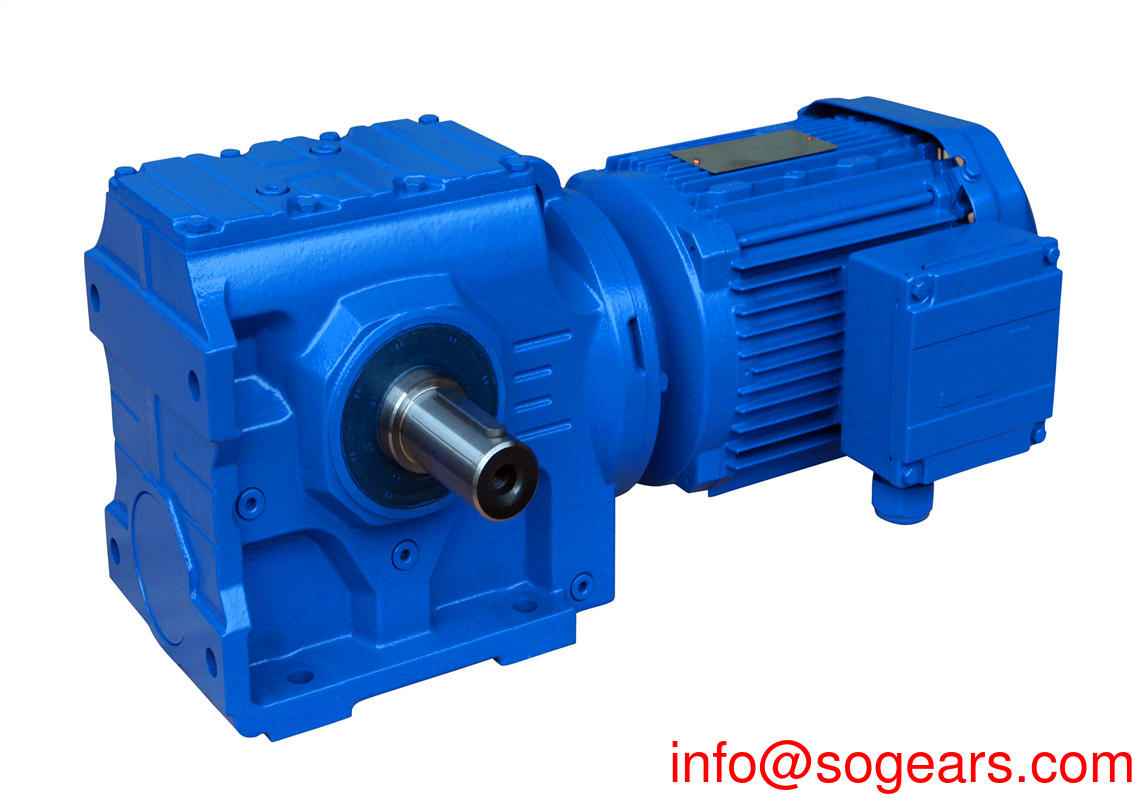
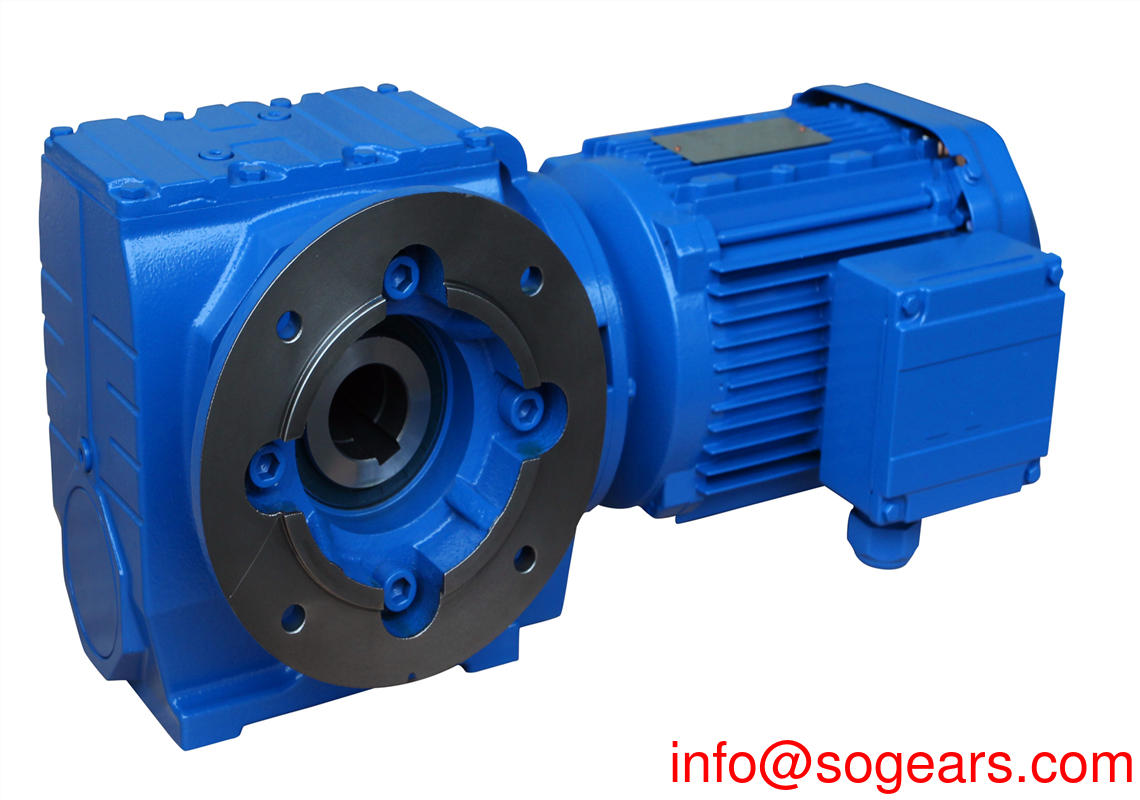
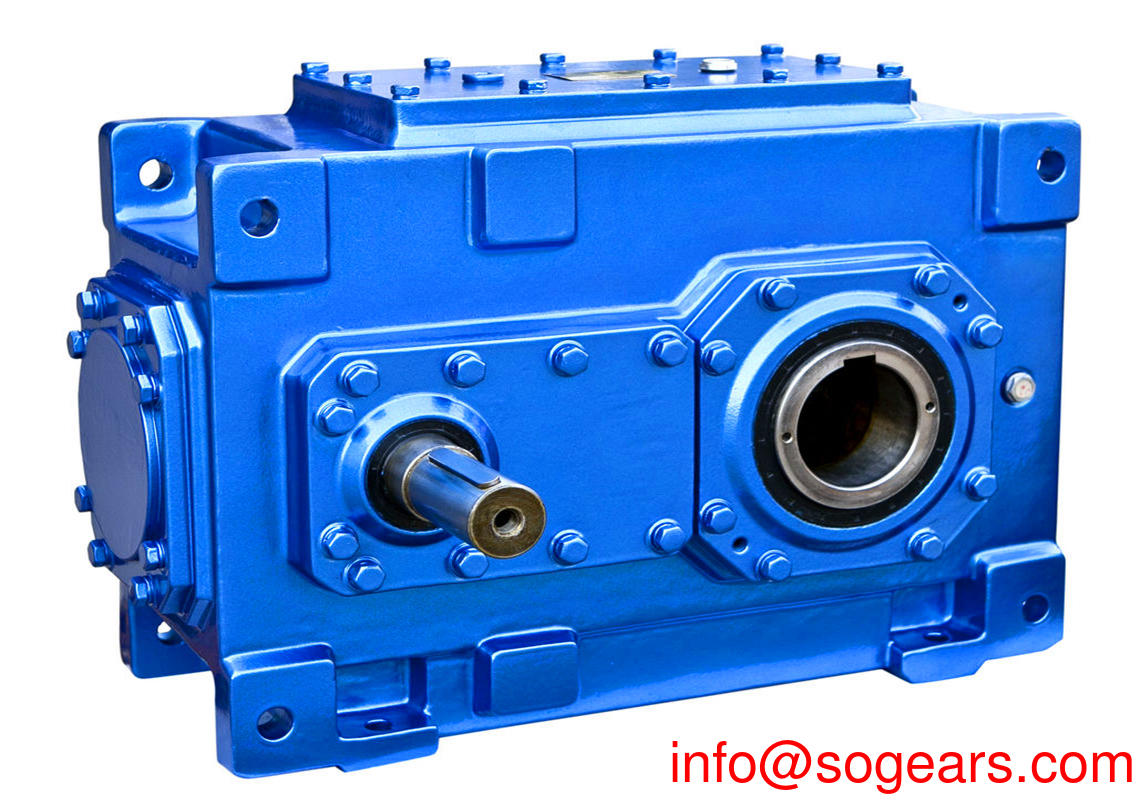
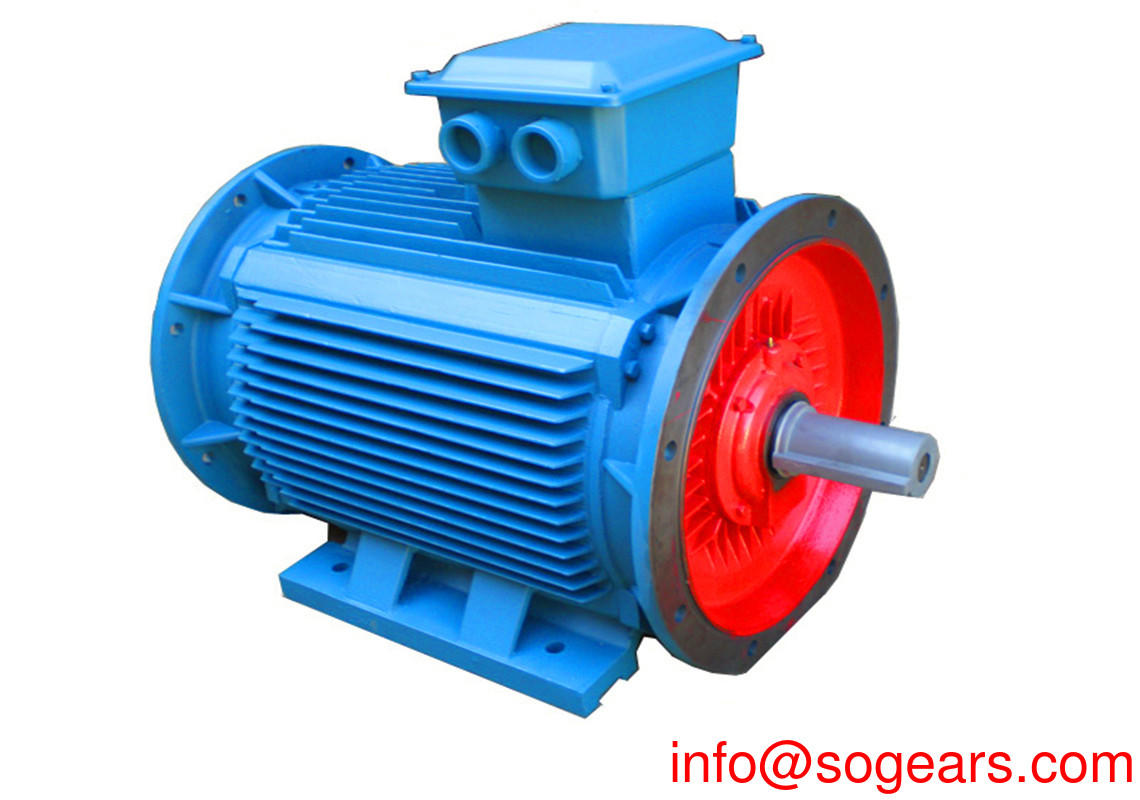
Avantatges únics del motor marí M3BP:
El motor M3BP té una alta fiabilitat, una alta fiabilitat significa una vida útil més llarga i una baixa taxa de fallada, de manera que la pèrdua de parada es produeix al mínim, continu i estable, amb la qual cosa s’obté una productivitat més alta; Disseny de bobines d'alta eficiència, filferro de coure de gran qualitat (filferro de coure esmaltat de polièster imide / poliamideimida de 200 graus), disseny rodó final compacte, bon ritme de ranura;
1. El sistema d’aïllament adopta diferents mètodes de tractament de l’aïllament en diferents condicions de treball: aïllament del tanc, aïllament de la capa, aïllament en fase d’immersió per goteig per goteig i sistema de recobriment de pressió a buit per assegurar un recobriment suficient de l’enrotllament i allargar la vida d’aïllament;
2. Estructura de laminació de xapa d'acer de silici laminada en fred del nucli estator;
3. Disseny de coixinets i segellats, llarga vida útil, rodament de lubricació de baixa qualitat, greix del rodament importat (SKF estàndard) amb altes especificacions, sistema de refrigeració d’alta eficiència per assegurar que el rodament funciona a baixa temperatura i un funcionament còmode del disseny de lubricació del rodament, motor gran amb disseny de tancament de taula lubrificant (suport de 280 a 450 estands), segell de coberta avançat del coixinet, evitar la filtració d’oli a l’interior del motor, evitar danys al bobinat, segons diferents utilitzant model de màquina de segellat radial, segell de laberint o anell de segellat en forma de v, adequat per a diferents condicions de treball;
4. Configuració estàndard IP 55 (IP56, IP65 opcional)
5. Disseny de baixa vibració, carcassa rígida de ferro colat d’alt grau, bon ajust de rodaments, major concentricitat del rotor fixe, conjunt de rodaments més fort;
6. L’augment de temperatura estrictament calculat fa més llarga la vida d’aïllament del bobinat i la vida útil del rodament. L’aïllament del grau F grau de pujada de la temperatura redueix la conducció de la temperatura al rodament i la temperatura de funcionament del rodament és menor
7. L’alta eficiència significa una alta eficiència en protecció del medi ambient, conservació d’energia i reducció d’emissions. Al reduir eficaçment el cost d’operació, els clients poden recuperar l’alt cost de compra en poc temps
8. Disseny electromagnètic de baix soroll, coincidència de ranures optimitzada per a diferents especificacions d'aplicació del motor, xut dissenyat especial per a diferents especificacions de rotor, reducció de sorolls, disseny mecànic, ventilador de baix soroll, tapa rígida, alta concentricitat del rotor fix per reduir la vibració
9. Big terminal box, connexió de rotació de 4 x90 °, aplicable a cada sortida / entrada de la línia (nota: base 71-132 per afegir implementació VC022), la sortida és la mateixa que la caixa de connexions del filferro superior, menys recanvi obligatori. parts, tots els terminals de l'element de detecció es poden instal·lar a la caixa de terminals (configuració estàndard separada de l'element de la detecció de l'element), independentment de l'orifici de sortida, fàcil de substituir la mida del forat de sortida, el tauler de pedaç té un anell de tancament de goma, pot proporcionar una caixa de connexió assistent, i es pot instal·lar després del motor a l'escena










































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}